UGOsansH.com
Retour d'expérience sur 20 ans de photogrammétrie
Mon parcours, mes astuces et techniques de photogrammétrie en lien avec le mapping vidéo
Définition de WikipédiA :
La photogrammétrie est une technique qui consiste à effectuer des mesures dans une scène, en utilisant la parallaxe obtenue entre des images acquises selon des points de vue différents. Recopiant la vision stéréoscopique humaine, elle a longtemps exploité celle-ci pour reconstituer le relief de la scène à partir de cette différence de points de vue. Actuellement, elle exploite de plus en plus les calculs de corrélation entre des images désormais numériques (photogrammétrie numérique).
Cette technique repose entièrement sur une modélisation rigoureuse de la géométrie des images et de leur acquisition afin de reconstituer une copie 3D exacte de la réalité.
Avant propos
De nos jours la photogrammétrie se démocratise grâce à la puissance des algorithmes , des ordinateurs et des appareils photo numériques.
Un simple téléphone moderne, une application de photogrammétrie et on peut capturer en 3d des objets, des intérieurs et même des façades d’immeuble, sans aucune notion au préalable.
Ici on parle de photogrammétrie en relation aux besoins de projection d’images repérées.
Le matériel de photogrammétrie change : il est plus “léger” en 2024 avec un simple appareil photo numérique par rapport à il y a 10 ans avec la prise de photos sphériques, où 20 ans quand le repérage se faisait à la chambre noire souvent faite maison en visant au travers de l’optique de projection.
Ce qui n’a pas change en revanche c’est le fait de devoir dans tous les cas redessiner de A à Z le modèle, d’au moins ses parties géométriques et architecturales. En aucun cas le modèle d’une façade crée automatiquement peut servir tel quel : le maillage est patatoïde, lourd et avec une texture en mosaïque. Le tout n’est pas adapté à la création d’images où l’on a besoin de calques, d’objets, de masques et d’un environnement léger qui profite à la fois aux graphistes pour leur confort de travail et pour la rapidité du rendu, et au système d’envoi des images pour la fluidité des flux à envoyer.
J’ai choisi la chronologie inverse, on commence par le plus récent et on va vers le passé.
en 2024
matériel
Appareil photo Nikon plein format, 24Mp
gamme d’otiques fixes : 24mm, 35mm, 50mm, 85mm, 105mm
optique zoom : 70-300mm
filtres polarisant, trépied léger, télémètre
logiciel
Reality Capture
DXO PhotoLab
3dsMax ou votre logiciel 3d préféré
Parmi les avantages du relevé photogrammétriques modernes il y à le fait de pouvoir photographier en séquence rapide et à la main levée pour peu que la lumière soit suffisante. Impressionnant le nombre de photos pouvant atteindre le 10k en une après-midi !
Choix de l'appareil photo numérique pour la photogrammétrie
Mon conseil est d’utiliser le plein format 24x36mm, format qui existe depuis plusieurs décennies.
Les optiques crées par les grandes marques pour ce format ont déjà fait leur preuves et sont d’une précision et d’un piquet redoutables.
Préférez les optiques fixes. A en choisir une seule ? Le 24mm.
Je vous conseil vivement les systèmes REFLEX pour des économies d’énergie.
Les bridges et les hybrides tirent beaucoup sur les batteries pour alimenter le viseur numérique et/ou l’écran. Avant tout achat, regardez bien dans les spécifications de l’appareil photo le nombre maximum possible de clichés enregistré sur une seule charge : si c’est de quelques centaines à peine, passez chemin !
A titre d’exemple je prends régulièrement plus de 5000 photos avec mon Nikon D600, en mode jpeg, écran éteint, sur une seule charge. Cela va même au delà des prestations annoncées !

Les filtres polarisants
En photogrammétrie les reflets sont nos ennemis !
Le filtre polarisant est composé de deux bagues : l’une, fixe, se visse en bout d’optique, l’autre permet de polariser la lumière en la faisant tourner.
Cet accessoire photo permet d’estomper, voir supprimer les reflets sur toutes surfaces transparentes telle que l’eau ou le verre. Ne fonctionne pas sur le chrome.
Poser un filtre est aussi une très bonne idées pour protéger les otiques.
Prise de vue
réglages de l’appareil photo : mode manuel, f8, 200 ISO.
si basse lumière, ouvrir le diaphragme et/ou augmenter les ISO.
Je distingue au moins trois catégories de photos lors de mes repérages :
– celles qui servent à la reconstruction uniquement
– celles qui servent à repérer des points dans l’espace
– celles prises dans le cadre spécifique de la mission, à savoir, les mires de projection et les vues public
coté météo, un ciel bien blanc uniforme et couvert donne les plus beaux résultats.
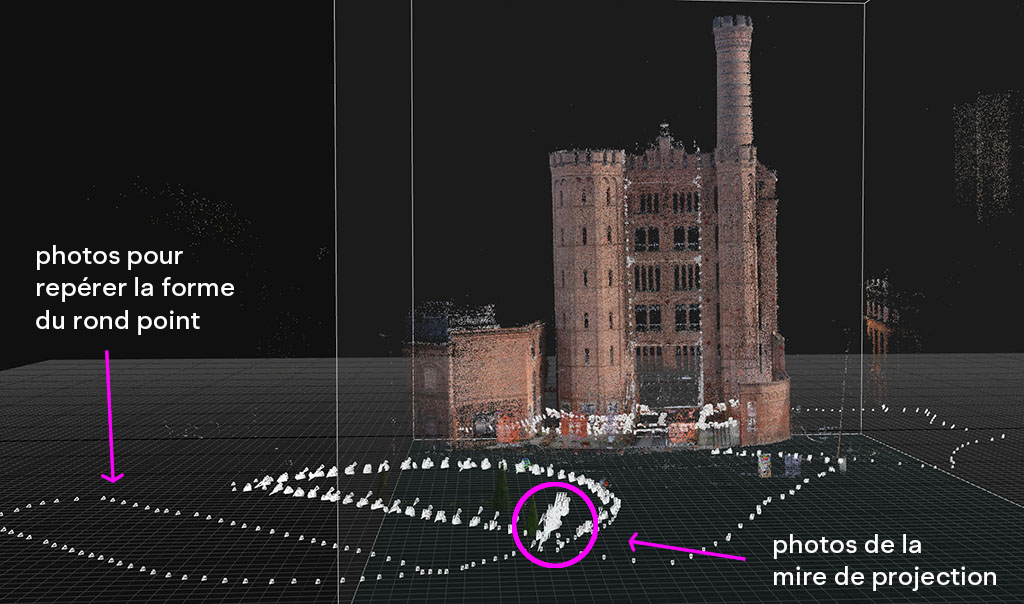
Roubaix, Archives Nationales du
Monde du Travail
Voici une capture d’écran du résultat photogrammétrique de la façade du SAMARITAINE de Paris, importé dans le logiciel 3d avec ses caméras.
La projection d’images est prévue de proximité pour les premiers étages et de l’autre coté de la Seine pour la partie haute. J’ai pris des photos à intervalles réguliers de part et d’autre du Pont Neuf en tant qu’images de repère. A la fin de la vidéo je compare les dessins d’architecte au modèle pour constater que tout est parfait.
De suite, des images de la Crypte des Gros Piliers au Mont Saint Michel. Repérage en basse lumière, avec pied photo, sans flash.
Nuage de point
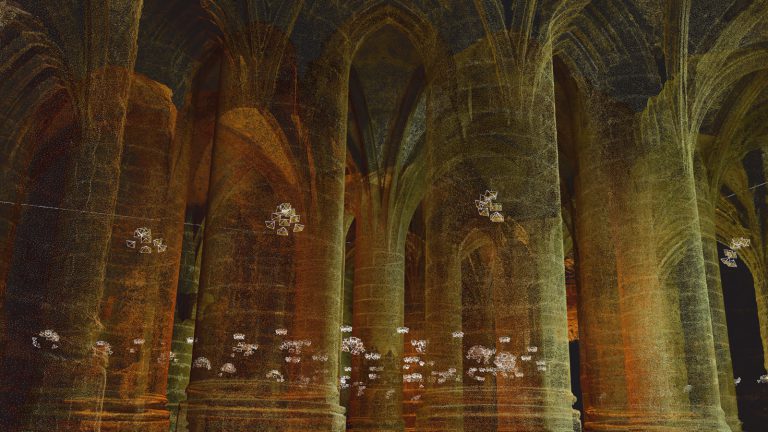
Modèle Photogrammétrique

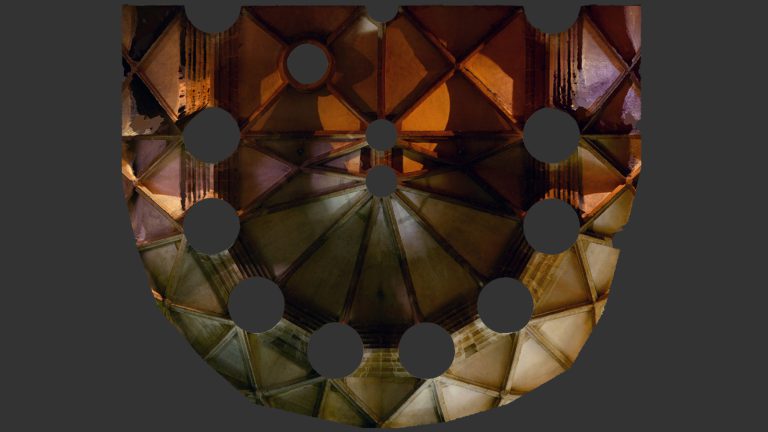
découpe dans le maillage 3D

Ortho Photo
Avec le simple modèle photogrammétrique mis à l’échelle je peux commencer à placer les vidéoprojecteurs dans l’espace tridimensionnel virtuel et prévisualiser l’effet de projection d’image ainsi que les ombres.
Important aussi dans cette phase de vérifier les optiques et les compromis de mise au point.
Tout cela peut se faire en parallèle à la re topologie 3d.

à partir de 2012 et jusqu'en 2018,
Photogrammétrie par photos panoramiques,
sphériques 360°
matériel
Appareil photo Nikon DX et plein format, 12.2Mp et 24Mp
otiques fixe 24mm
trépied lourd et stable + tête panoramique VR 360°
trépied léger pour réglage de la tête
télémètre
logiciel
PT Gui, assemble les photos sphériques
ImageModeler
3dsMax ou votre logiciel 3d préféré
La tête panoramique 360° VR consiste en un système de renvois par plaques coulissantes qui permettent de choisir le centre de rotation de l’appareil photo.
Le point que l’on cherche à aligner c’est le centre nodale de l’optique utilisée, là où se situe le plan du diaphragme.
Ceci faisant, l’optique tourne exactement sur elle même.
Aucune différence de parallaxe entre les objets proches et lointains n’apparait dans les photos.
Les photos peuvent être collées ensemble pour composer une photo panoramique unique.
J’utilise toujours un 24mm fixe pour réaliser mes photos sphériques. J’ai fait des repères sur la tête panoramique et sur l’optique pour aller plus vite lors des mises en place.
La base de la tête panoramique est composée d’une tête rotative où l’on peut choisir l’intervalle en angle° sur 360° pour avoir un léger cran à la rotation. Avec le 24mm, pour avoir une bonne superposition entre les clichés, je l’ai réglé sur 30° soit 12 photos pour faire le tour.
Un tour incliné de 30° vers, le haut, un tour incliné de 30° vers le bas, une photo tout en haut et une tout en bas = 26 photos par panoramique.
Côté pied photo, ce qu’on lui demande c’est de la stabilité avant tout. Si l’on s’aperçoive d’un mouvement même minime du pied durant la prise de photo, il faut recommencer.
Le matériel à transporter est assez lourd.

Photos sphériques 360°, projection equirectangulaire, ratio d'image de 1:2
Ces images peuvent mapper une sphére
L’exemple typique qui parle à tout le monde est la carte du monde.
Dans l’image en bas vous avez une carte du monde et la même image mappé sur une sphère dans un logiciel 3D
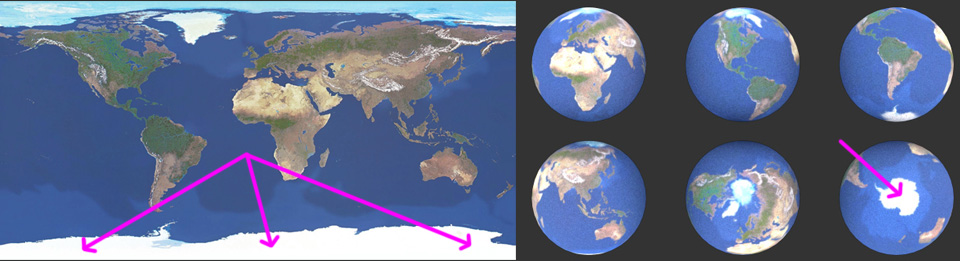
à noter l’importante différence de taille de la représentation des pôles dans l’image à plat comparé à la même image mappé
de 2012 à 2018 j’utilise le logiciel ImageModeler qui n’est plus à jour depuis 2009. Ce logiciel fonctionne très bien avec les photos sphériques. C’est un début d’intelligence artificielle qu’il faut accompagner et guider dans un premier temps.
Phase 1 repérage
tout commence par se rendre sur les lieux du repérage, monter et calibrer la tête panoramique, prendre un maximum de photos sphériques (quelques dizaines) et de mesures. Prendre avec une attention particulière les photos des vues du public et depuis les tours de projection. Bien évidement, prendre aussi des photos de détail à la main levée et en changeant d’optique, pour avoir plus de matière pour la dernière phase : la modélisation.
De retour du repérage il faut dérocher les phots et créer les panoramiques.
Les panoramiques à base de 26 photos de 24 Mp donnent naissances à des panoramiques qui dépassent les 300Mp !
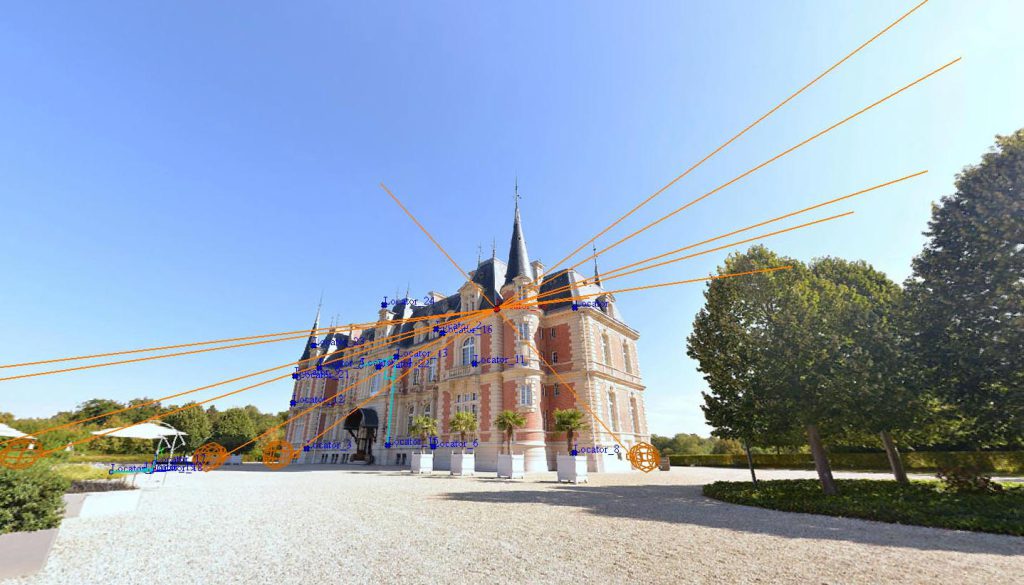
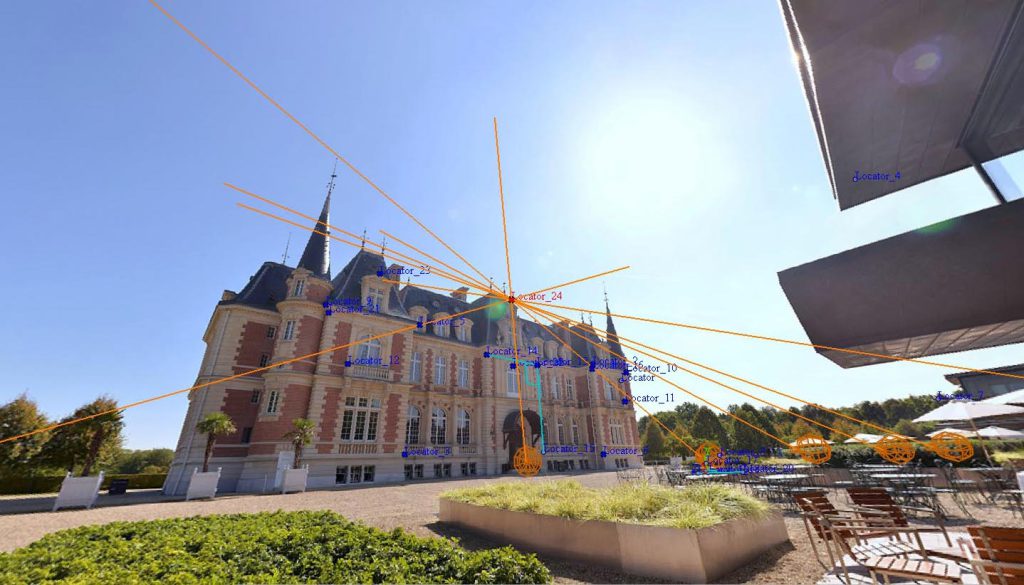
Dans l’exemple qui suit, 8 photos panoramiques sont mis en œuvre.
Les 8 photos chargées dans ImageModeler, il faut placer des points dits “Locator” à des endroits choisis du bâtiment et visibles de chaque panoramique.
Au bout d’une vingtaine de Locators, ImageModeler est enfin capable de déduire la position dans l’espace des Locators et des panoramiques.
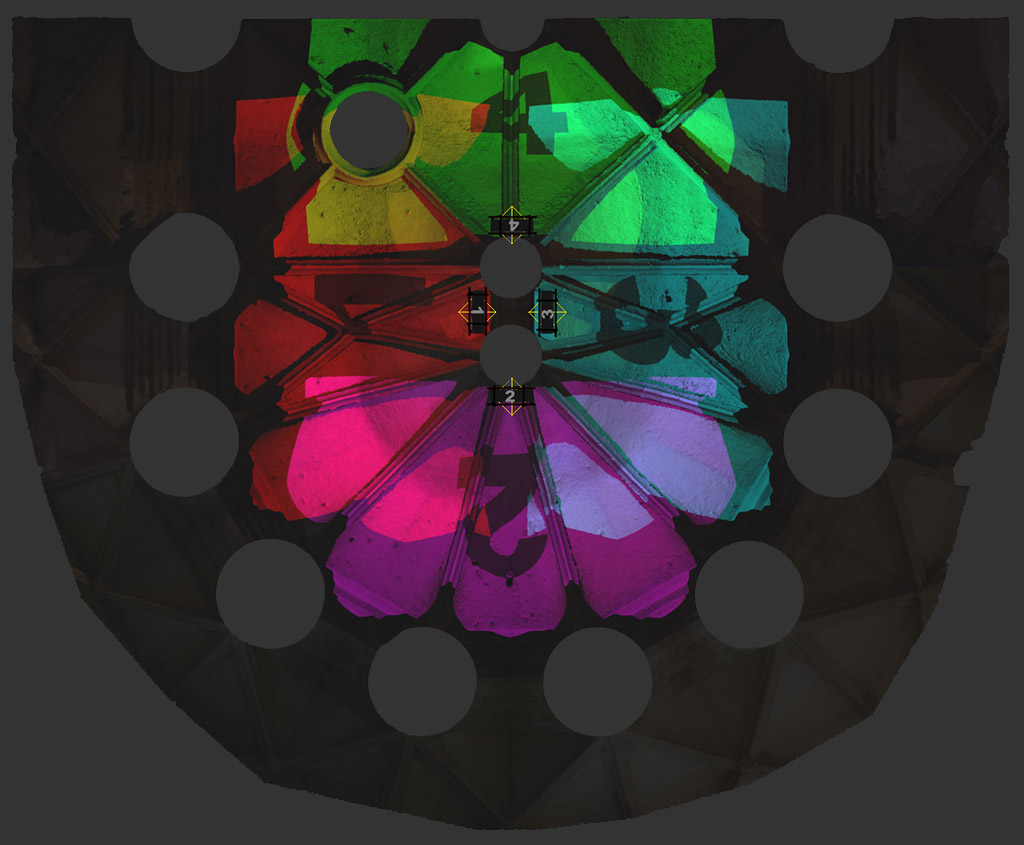
Plus bas l’interface d’ImageModeler.
En bas nous avons 8 vignettes correspondantes aux 8 panoramiques. La première vignette est bordée de jaune, c’est le panoramique qui est affiché.
A droite de l’interface la liste des Locator que j’ai placé manuellement. Ils sont tous au vert, c’est cool ! On voit que l’erreur résiduel est de 0.33 pixels !
Dans la photo, un Locator est sélectionné et l’on voit des lignes oranges le traverser. Au bout de ces lignes des sphères qui symbolisent les panoramiques dans l’espace. Ces lignes indiquent tous les panoramiques qui voient le Locator sélectionné.




il est temps d’exporter ce mini nuage manuel de 24 point ainsi que les 8 caméras vers le logiciel 3D
Importation et modélisation manuelle de l'écran à reproduire
L’export/import se fait via un fichier .fbx.
Dans le logiciel 3d nous pouvons commencer la modélisation manuelle tout en visant au travers des photos panoramiques parfaitement positionnés dans l’espace. Ce que je modélise se trouve au bon endroit vu depuis plusieurs points de vue. C’est une modélisation sans CTRL-Z, toujours en avant !
L’exemple qui suit est assez intéressant.
Le bâtiment est en verre et le sujet de l’étude ce sont les voiles en verre qui habillent ses façades.
Le repérage au SCAN : impossible !
Photogrammétrie automatique ? Très difficile à cause des reflets et des transparences !
Par images sphériques 360° ? Pas de soucis !
Plus bas, mon premier et dernier boulot avec cette technique.
2014 | DrugStore Paris, LED mapping
La demande est de donner le nombre de LED pour mapper les voiles en verre qui habillent un bâtiment en verre tout en assurant une prévisualisation contractuelle et la fourniture de la mire de projection.
2012 | National Concert Hall of Budapest
premier projet de photogrammétrie par images sphériques 360°
2018 | National Concert Hall of Budapest
dernier projet de photogrammétrie par images sphériques 360°
les années 1990 / 2000
Dans les années ’90 la photogrammétrie était argentique. La projection d’image aussi d’ailleurs ! Les appareils photos numériques sont très chers et encore peux performants. Cela n’empêche de pouvoir dessiner proprement et précisément des bâtiments de grande taille.
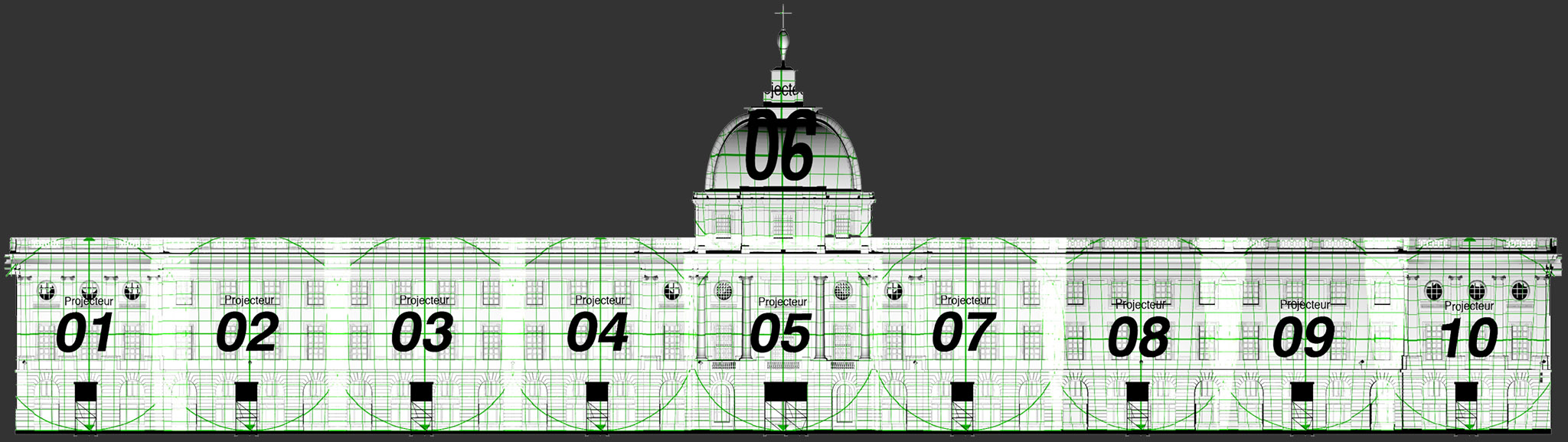
Ici, l’Hôtel Dieux de Lyon, 197 mètres d’envergure, 10 projecteurs de lumière sur plaque fixe, 4 soirées, une image fixe analogique par soirée.
La photogrammétrie est basée sur les 10 photos correspondantes aux 10 vues projecteurs, prises quelques mois avant la représentation au moment du repérage optique.
Ces 10 photos argentiques ont étés prises depuis un échafaudage mobile pour nous ramener à la position de chaque projecteur, avec un appareil photo numérique Nikon D100.
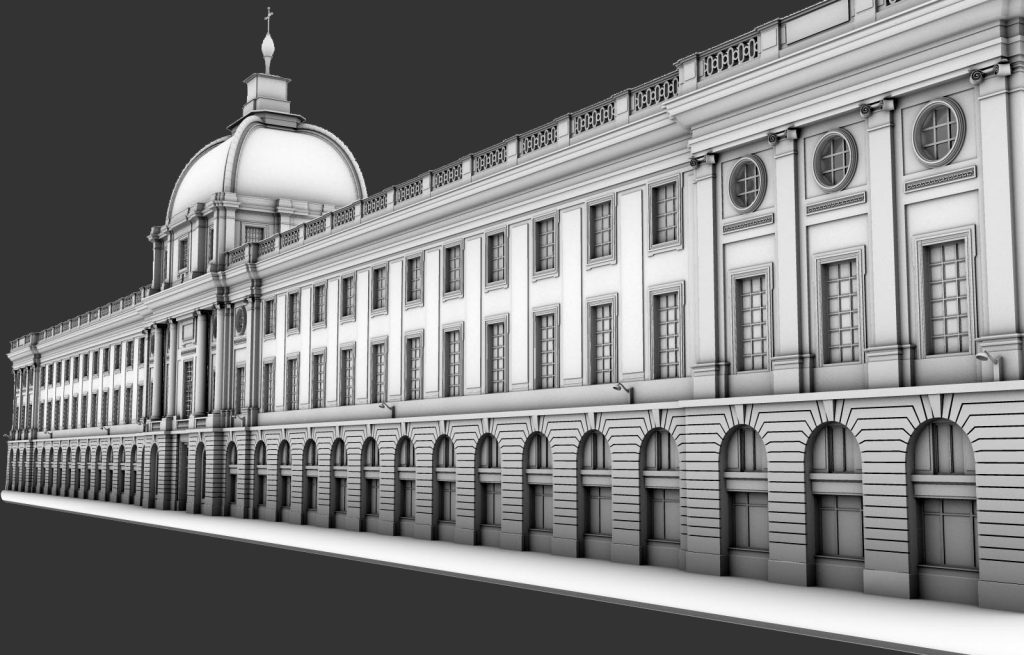
En projection repérée analogique et avec des optiques fixes il est primordial de voir avec précision ce que le projecteur vois à son emplacement physique. Petit rappel, pas de grille de déformation possible !
C’est à l’aide d’une chambre noire maison que Christophe Bertiaux à pu photographier les mires de projection en visant au travers de l’optique du projecteur.
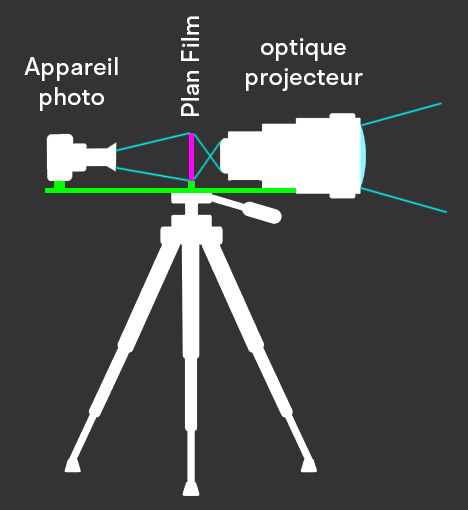

schéma de montage d’une chambre noire pour le repérage optique en projection analogique
La chambre noire consiste en un rail métallique réglable (en vert dans le schéma) qui supporte l’appareil photo, la plaque en verre de 18x18cm qui recueille l’image imprimée à projeter et l’optique du projecteurs qui sera utilisée lors de la projection.
La distance entre la plaque et l’optique de projection doit respecter exactement les valeurs mesurées sur le projecteur.
Pour la distance entre l’appareil photo et la plaque il y a plus de liberté.
Deux mises au point sont nécessaires.
La première avec l’optique du projecteur pour reproduire une image nette (et inversée) du bâtiment sur la plaque.
La deuxième, entre l’appareil photo et la plaque à seulement quelques centimètres.
Entre les deux feuilles de verre de la plaque, un calque transparent avec un quadrillage au centimètre.
L’ensemble monté sur un trépied et surmonté d’un tissu épais noir qui ne laisse apparaître que la sortie optique.

Les photos du repérage optique sont projetés dans l’espace virtuel d’un logiciel 3d et la ré-topologie tridimensionnelle du bâtiment peut commencer.
Le procédé est entièrement manuel.